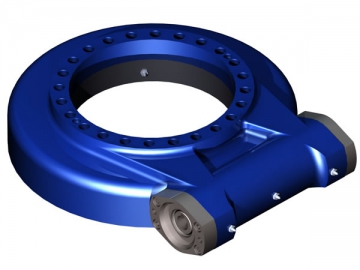
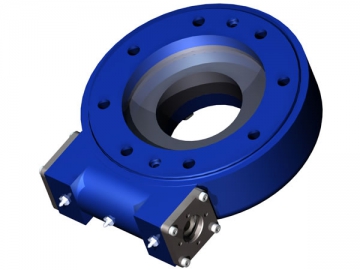
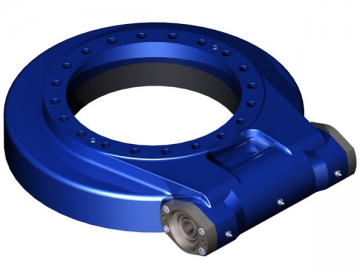
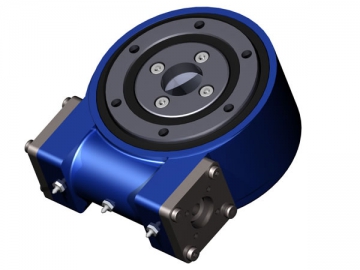
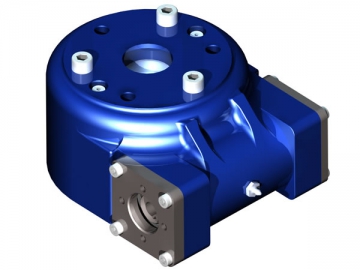
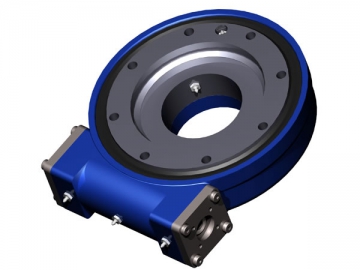
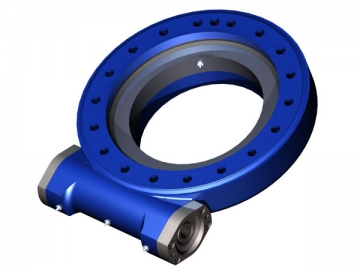
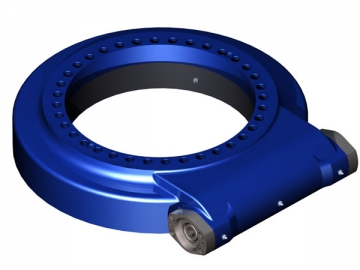
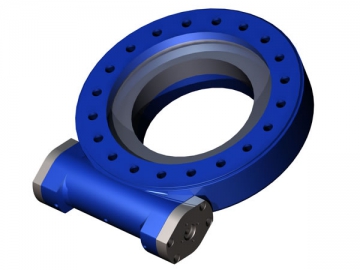
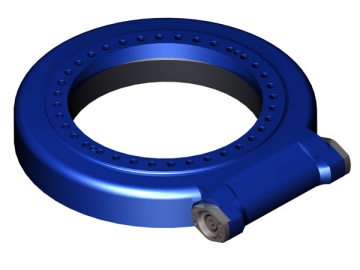
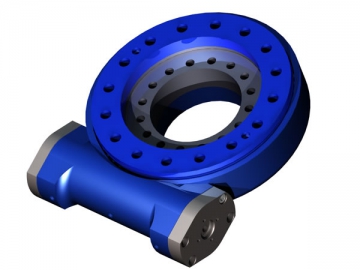
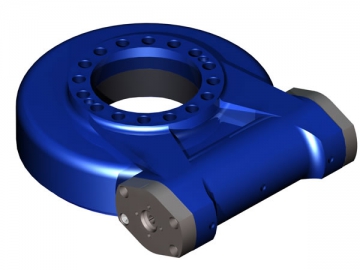
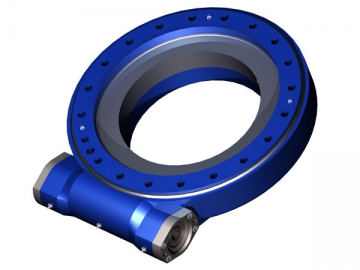
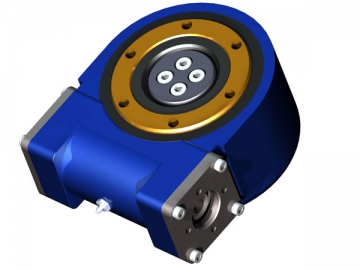
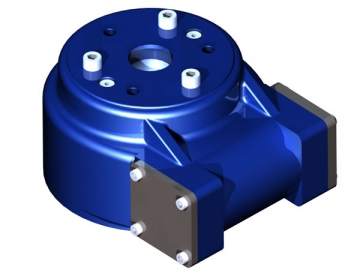
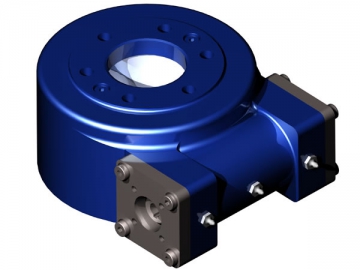
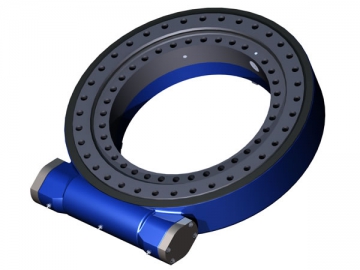
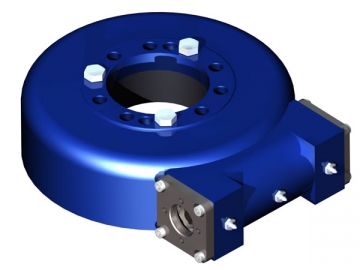
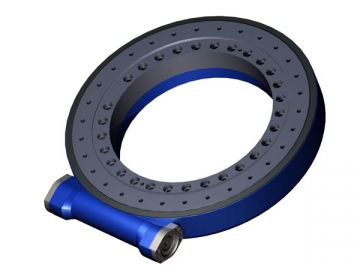
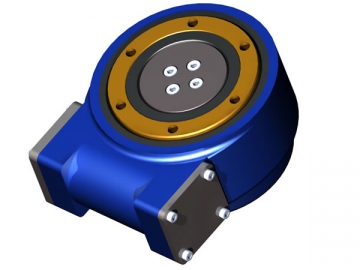
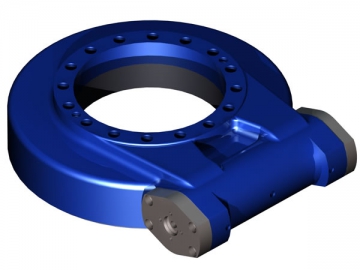
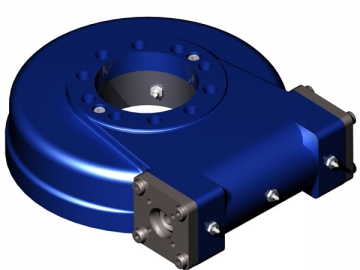
The SE series horizontally mounted slewing drive consists of the enclosed housing, slewing ring, hourglass worm, and supporting parts. An electric or hydraulic motor can be used as the power input source to drive the gear unit to make clockwise and counterclockwise rotation. Due to the adoption of the slewing ring, our slewing drive has large overturning moment and axial force. Compared with the gearbox with the same parameters, our slew drive is characterized by smaller size and more convenient maintenance.
Features
1. With an enclosed structure, our horizontally mounted slewing drive is able to resist wind, rain and other harsh natural environment and is thus suitable for use in the wild.
2. This worm gear set can successfully solve the problem of making two objects rotate.
3. To bring the greatest convenience to customers, we select a universal installation structure which improves the interchangeability of products.
4. Our worm drive can be installed in parallel with the ground or at a small gradient to enable the relative rotating structure to rotate.
5. The SE series slewing drive is one of our earliest and the most widely used products. It has been approved in the European and American markets.
6. Produced in strict accordance with ISO 9001 standard, this device has obtained the CE mark.
Supply Capacity
No matter it is the whole slewing drive or the slewing ring or hourglass worm, we can provide customized services for customers.
Application
The SE series slewing drive is widely used in the machinery and solar power fields.
1. Level and pitch angle drive of photovoltaic power generation tracker
2. Rotation in the chassis of aerial vehicles
3. Drive the boom of the truck mounted crane to rotate
| Model | Output Torque | Overturning moment | Holding Torque | Axial Static Load | Radial Static Load | Axial Dynamic Load | Radial Dynamic Load | Reduction Ratio | Tracking Precision | Weight |
| SE3C | 400 N•m | 1100 N•m | 2000 N•m | 30 kN | 16.6 kN | 9.6 kN | 8.4 kN | 62:1 | ≤ 0.2° | 12kg |
| 295 lbf•ft | 811 lbf•ft | 1475 lbf•ft | 6744 lbf | 3732 lbf | 2158 lbf | 1888 lbf |
| Model | Output Torque | Overturning moment | Holding Torque | Axial Static Load | Radial Static Load | Axial Dynamic Load | Radial Dynamic Load | Reduction Ratio | Tracking Precision | Weight |
| SE5A | 600 N•m | 3000 N•m | 5500 N•m | 45 kN | 22 kN | 14.4 kN | 11.1 kN | 62:1 | ≤ 0.2° | 20kg |
| 442.5 lbf•ft | 2212.5 lbf•ft | 4056.25 lbf•ft | 10116 lbf | 4945.6 lbf | 3237.1 lbf | 2495.3 lbf |
| Model | Output Torque | Overturning moment | Holding Torque | Axial Static Load | Radial Static Load | Axial Dynamic Load | Radial Dynamic Load | Reduction Ratio | Tracking Precision | Weight |
| SE5C | 600 N•m | 2800 N•m | 5000 N•m | 45 kN | 22 kN | 14.4 kN | 11.1 kN | 62:1 | ≤ 0.2° | 16kg |
| 442.5 lbf•ft | 2066.4 lbf•ft | 3690 lbf•ft | 10116 lbf | 4945.6 lbf | 3237.1 lbf | 2495.3 lbf |
| Model | Output Torque | Overturning moment | Holding Torque | Axial Static Load | Radial Static Load | Axial Dynamic Load | Radial Dynamic Load | Reduction Ratio | Tracking Precision | Weight |
| SE7 | 1500 N•m | 13500 N•m | 10400 N•m | 133 kN | 53 kN | 32 kN | 28 kN | 73:1 | ≤ 0.2° | 21kg |
| 1107 lbf•ft | 9957 lbf•ft | 7671 lbf•ft | 29900 lbf | 11915 lbf | 7194 lbf | 6295 lbf |
| Model | Output Torque | Overturning moment | Holding Torque | Axial Static Load | Radial Static Load | Axial Dynamic Load | Radial Dynamic Load | Reduction Ratio | Tracking Precision | Weight |
| SE7A | 1500 N•m | 13500 N•m | 10400 N•m | 133 kN | 53 kN | 32 kN | 28 kN | 73:1 | ≤ 0.2° | 25kg |
| 1107 lbf•ft | 9957 lbf•ft | 7671 lbf•ft | 29900 lbf | 11915 lbf | 7194 lbf | 6295 lbf |
| Model | Output Torque | Overturning moment | Holding Torque | Axial Static Load | Radial Static Load | Axial Dynamic Load | Radial Dynamic Load | Reduction Ratio | Tracking Precision | Weight |
| SE9A | 6.5 kN•m | 33.9 kN•m | 38.7 kN•m | 338 kN | 135 kN | 81 kN | 71 kN | 61:1 | ≤ 0.17° | 49kg |
| 4794 lbf•ft | 25×10^3 lbf•ft | 29×10^3 lbf•ft | 76×10^3 lbf | 30×10^3 lbf | 18×10^3 lbf | 16×10^3 lbf |
| Model | Output Torque | Overturning moment | Holding Torque | Axial Static Load | Radial Static Load | Axial Dynamic Load | Radial Dynamic Load | Reduction Ratio | Tracking Precision | Weight |
| SE12A | 7.5 kN•m | 54.3 kN•m | 43 kN•m | 475 kN | 190 kN | 114 kN | 100 kN | 78:1 | ≤ 0.17° | 61kg |
| 5532 lbf•ft | 40×10^3 lbf•ft | 32×10^3 lbf•ft | 107×10^3 lbf | 43×10^3 lbf | 26×10^3 lbf | 23×10^3 lbf |
| Model | Output Torque | Overturning moment | Holding Torque | Axial Static Load | Radial Static Load | Axial Dynamic Load | Radial Dynamic Load | Reduction Ratio | Tracking Precision | Weight |
| SE14A | 8 kN•m | 67.8 kN•m | 48 kN•m | 555 kN | 222 kN | 133 kN | 117 kN | 85 : 1 | ≤ 0.17° | 64kg |
| 5900 lbf•ft | 50×10^3 lbf•ft | 35×10^3 lbf•ft | 125×10^3 lbf | 50×10^3 lbf | 30×10^3 lbf | 26×10^3 lbf |
| Model | Output Torque | Overturning moment | Holding Torque | Axial Static Load | Radial Static Load | Axial Dynamic Load | Radial Dynamic Load | Reduction Ratio | Tracking Precision | Weight |
| SE17A | 10 kN•m | 135.6 kN•m | 72.3 kN•m | 970 kN | 390 kN | 235 kN | 205 kN | 102 : 1 | ≤ 0.15° | 105kg |
| 7400 lbf•ft | 100×10^3 lbf•ft | 53×10^3 lbf•ft | 218×10^3 lbf | 88×10^3 lbf | 53×10^3 lbf | 46×10^3 lbf |
| Model | Output Torque | Overturning moment | Holding Torque | Axial Static Load | Radial Static Load | Axial Dynamic Load | Radial Dynamic Load | Reduction Ratio | Tracking Precision | Weight |
| SE21 | 15 kN•m | 203 kN•m | 105.8 kN•m | 1598 kN | 640 kN | 385 kN | 335 kN | 125 : 1 | ≤ 0.15° | 149kg |
| 11000 lbf•ft | 150×10^3 lbf•ft | 78×10^3 lbf•ft | 359×10^3 lbf | 144×10^3 lbf | 87×10^3 lbf | 75×10^3 lbf |
| Model | Output Torque | Overturning moment | Holding Torque | Axial Static Load | Radial Static Load | Axial Dynamic Load | Radial Dynamic Load | Reduction Ratio | Tracking Precision | Weight |
| SE25 | 18 kN•m | 271 kN•m | 158.3 kN•m | 2360 kN | 945 kN | 590 kN | 470 kN | 150 : 1 | ≤ 0.15° | 204kg |
| 13300 lbf•ft | 200×10^3 lbf•ft | 117×10^3 lbf•ft | 531×10^3 lbf | 212×10^3 lbf | 133×10^3 lbf | 106×10^3 lbf |













")




")











